Nissan ја тестира невидливо-во-видливо технологијата во патни услови
Аугментната реалност ја наоѓа својата примена и во автомобилскиот свет
Nissan ваквата своја технологија ја претстави на CES во Лас Вегас оваа година. Nissan ја тестира употребата на аугментната реалност при автономното возење. Невидливата во видлива, Invisible-to-Visible (I2V), технологија помага да се спои реалниот и виртуелниот свет, овозможувајќи му на возачот да види и зад објектите како што се зградите.
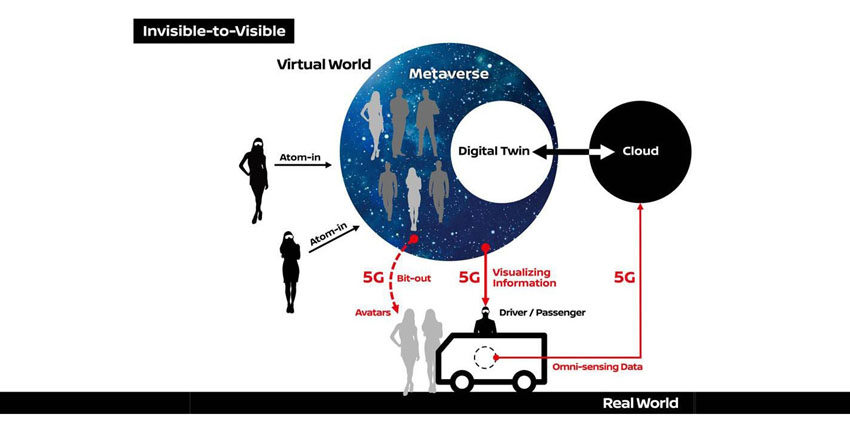
Невидливо-во-видливо (I2V) прв пат беше претставена од Nissan на CES 2019 во Лас Вегас и сега се тестира при возење. Со спојување на информации од сензорите надвор и внатре во возилото со податоци од Cloud, системот му овозможува на возачот да добие сеопфатен поглед на опкружувањето на возилото и пошироко.
За постигнување на ова, технологијата Omni-Sensing од Nissan во реално време ги собира податоците од сообраќајната околина и од опкружувањето и внатрешноста на возилото. Технологијата на Nissan Sam (Seamless Autonomous Mobility) ги анализира податоците, додека ProPilot, полу-автономниот систем за поддршка на возачот обезбедува информации за опклужувањето на возилото.
Технологијата на Nissan I2V има за цел да го направи возењето посигурно, но и поудобно. На пример, при возење на дожд, внатре во возилото може да се проектира пејзаж од сончев ден. Патниците исто така се поврзани со т.н. „Metaverse” и можат да комуницираат со други луѓе во виртуелниот свет преку употреба на аватари.
Меѓу другото, со I2V тестовите се испитува како патниците и лицата прикажани со аватари го восприемаат присуството на едни со други преку корисничкиот интерфејс. Nissan во моментот користи NV350 Camper за тестовите во сопствениот објект за тестирање Grandrive во Yokosuka, Јапонија. NTT Docomo го обезбедува мобилниот 5G интернет кој се користи за пренос на аватар податоците и сликите од камерата од возилото.



